Design, Modeling and Control for a Tilt-rotor VTOL UAV in the Presence of Actuator Failure
Enabling vertical take-off and landing while providing the ability to fly long ranges opens the door to a wide range of new real-world aircraft applications while improving many existing tasks. Tiltrotor vertical take-off and landing (VTOL) unmanned aerial vehicles (UAVs) are a better choice than fixed-wing and multirotor aircraft for such applications. Prior works on these aircraft have addressed the aerodynamic performance, design, modeling, and control. However, a less explored area is the study of their potential fault tolerance due to their inherent redundancy, which allows them to tolerate some degree of actuation failure. This paper introduces tolerance to several types of actuator failures in a tiltrotor VTOL aircraft.
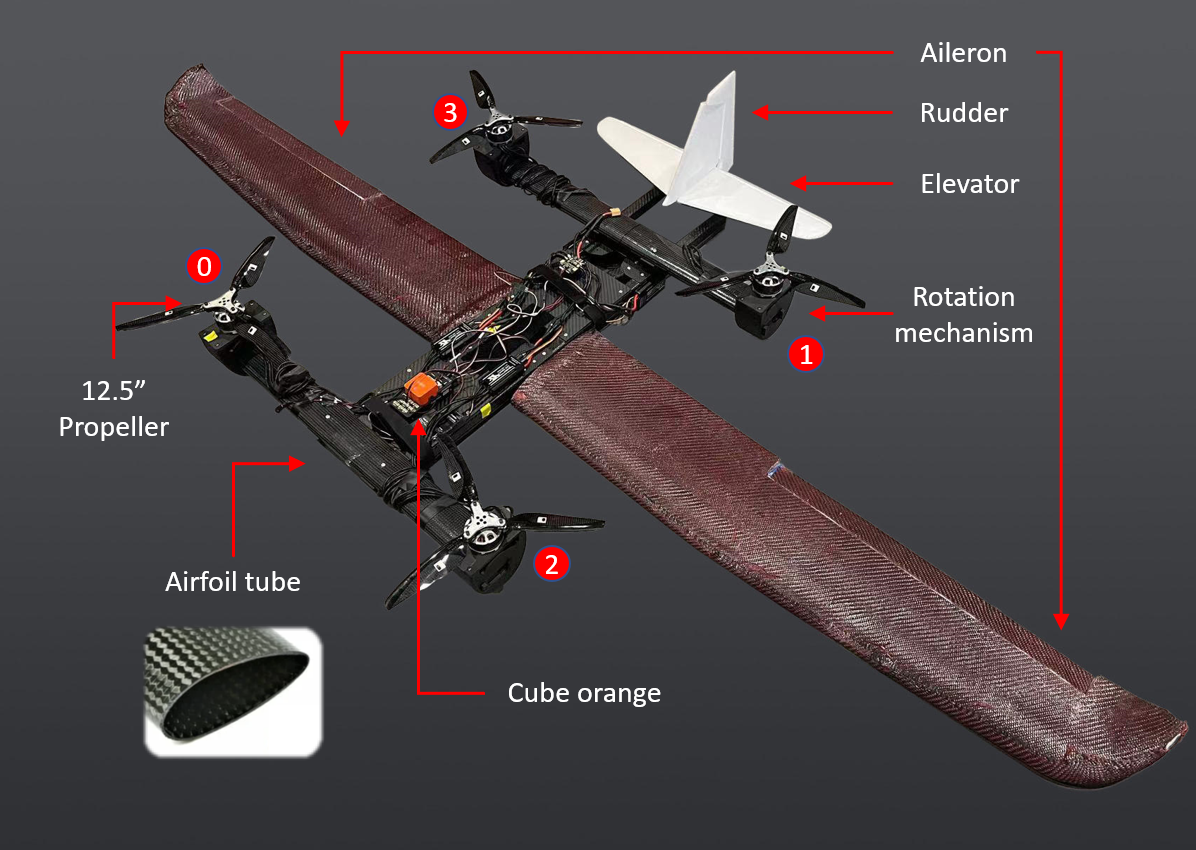
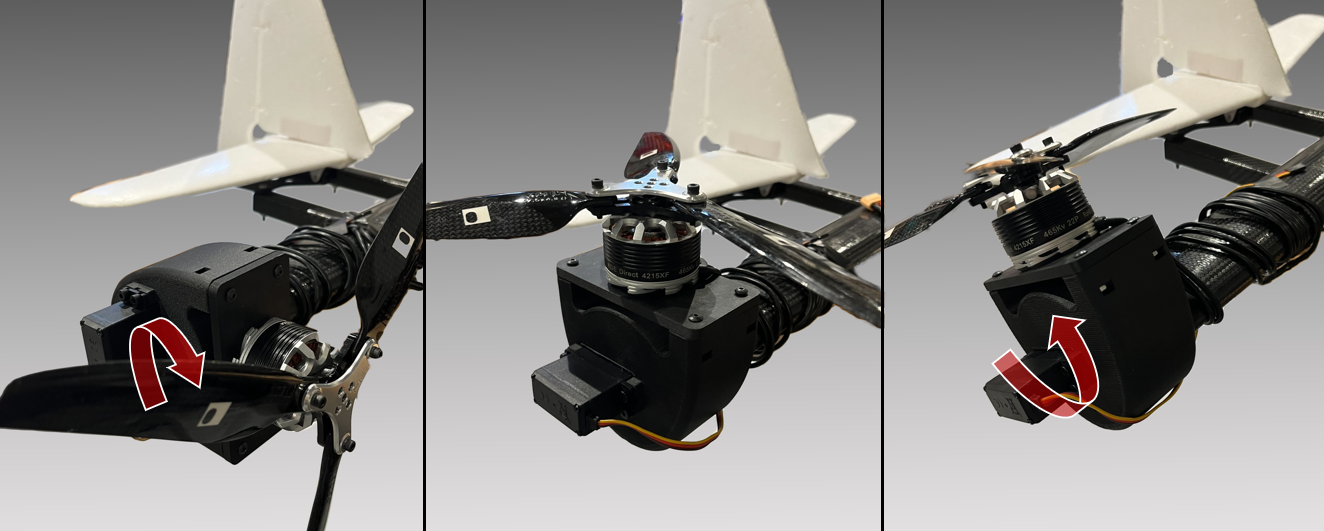
System Design
We design of tiltrotor VTOL UAV, which combines a fixed-wing aircraft and a variable-pitch quadrotor UAV. The direction of the four propellers can be individually controlled. Different from the tilting design in the state-of-the-art with an additional arm length, twin-rotors or other tilting multi-rotors, our quadrotor arms are entirely separated from the main wing, which makes the control less affected by the unexpected wing deformation. In addition, our tilting mechanism directly tilts the rotors at the end of the quadrotor arm. Moreover, the quadrotor arms have airfoil cross-sections, which can provide additional lift for the vehicle during forward motion.
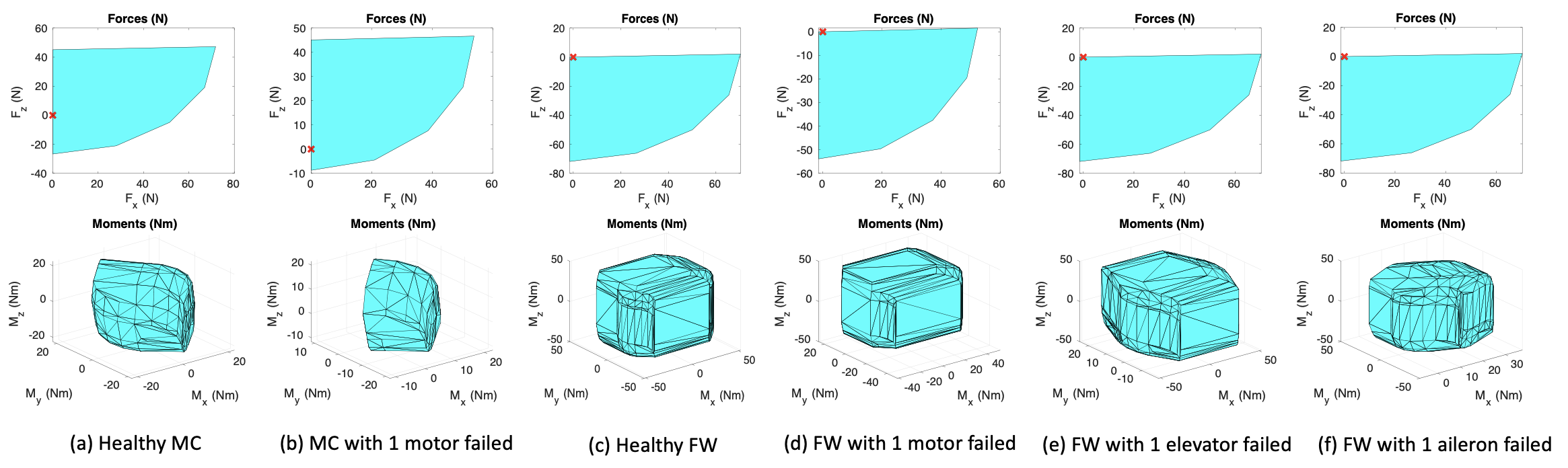
Wrench Space Analysis
We model the nonlinear dynamics, and then perform the wrench space analysis for the designed tiltrotor VTOL UAV under different flight configuration, static hovering, cruise flight and that when there is actuator failures.
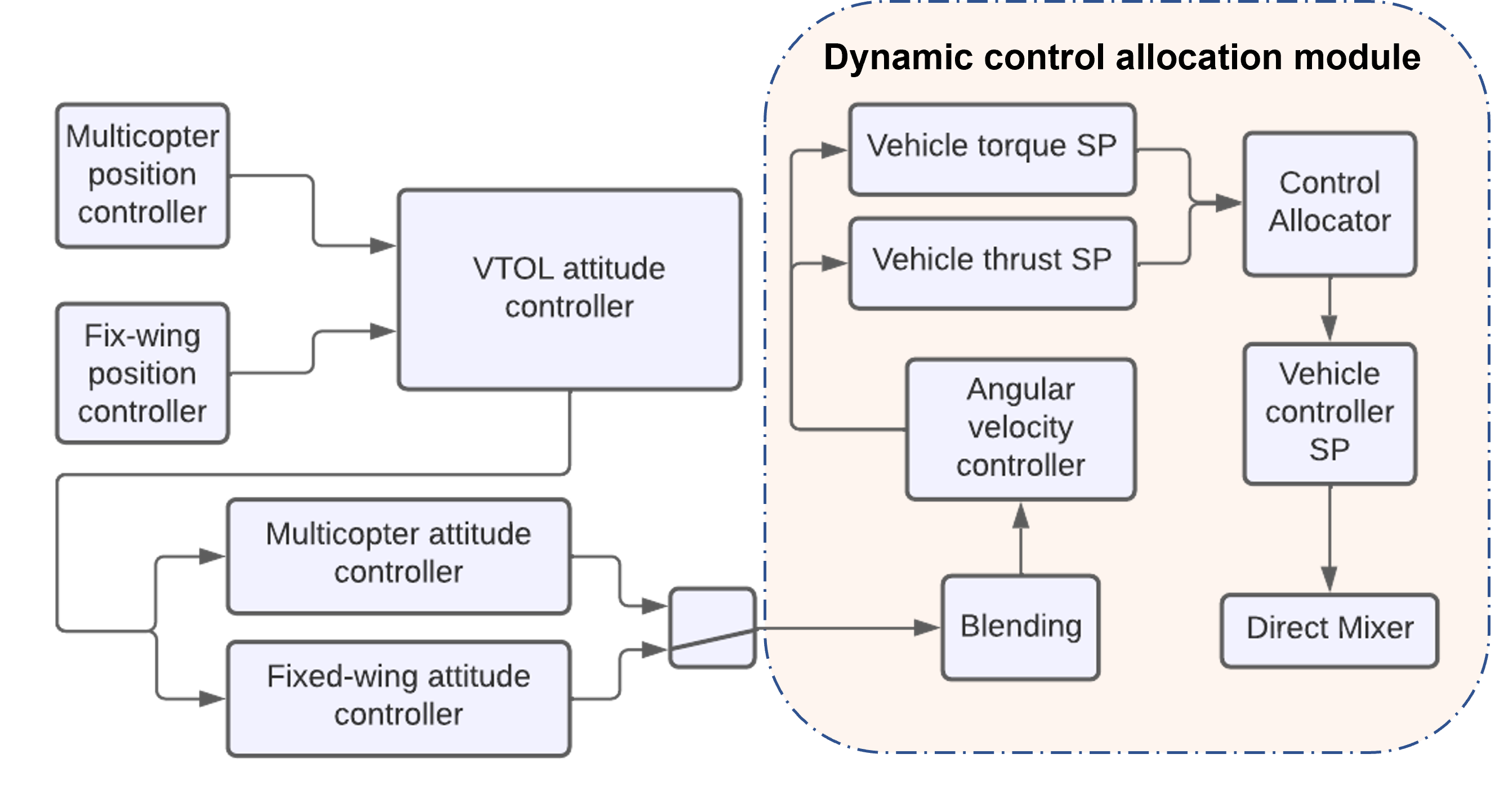
Control in Actuator Failure
The existing solution for VTOL UAVs usually needs to load the proper mixer files to map the desired control wrench to each actuator input, which can only handle the aircraft with a fixed configuration. Instead, we developed a dynamic control allocation scheme, so it adapts to a potential vehicle configuration change, such as an actuator failure. This dynamic control allocation benefits from configuration redundancy to make the aircraft robust to actuator failures. By solving a constraint optimization problem under a carefully designed objective, the aircraft can recover from a set of actuator failures in different flight phases of the VTOL.
Validation
We validate our approach on a set of actuator failure cases, including motor failure, control surfaces lock under difference flight phases: multirotor and fixed-wing.
Video
Related Paper
The general ideas on design and modeling of our custom tiltrotor VTOL and desing of the optimization based dynamic control allocation (so that the system can adapt to actuator failures) are described in the following publication (access on arXiv):
BibTeX:
@inproceedings{mousaei2022design,
title={Design, Modeling and Control for a Tilt-rotor VTOL UAV in the Presence of Actuator Failure},
author={Mousaei, Mohammadreza and Geng, Junyi and Keipour, Azarakhsh and Bai, Dongwei and Scherer, Sebastian},
booktitle={2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4310--4317},
year={2022},
organization={IEEE}
}
Contact
Mohammadreza Mousaei (mmousaei [at] cs [dot] cmu [dot] edu)
Junyi Geng - (junyigen [at] andrew [dot] cmu [dot] edu)
Azarakhsh Keipour - (keipour [at] cmu [dot] edu)
Dongwei Bai - (saeedb [at] andrew [dot] cmu [dot] edu)
Sebastian Scherer - (basti [at] cmu [dot] edu)

